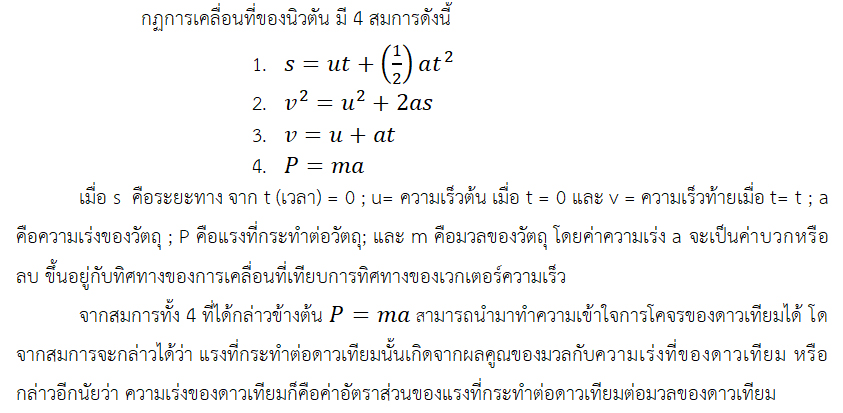
ตามกฎพื้นฐานของกลศาสตร์ท้องฟ้า โดยเริ่มต้นจากกฏของการเคลื่อนที่ของนิวตัน ที่จะอธิบายการเคลื่อนที่ของวัตถุ ซึ่งจะสามารถพิจารณาแรงต่าง ๆ ที่กระทำต่อดาวเทียมได้
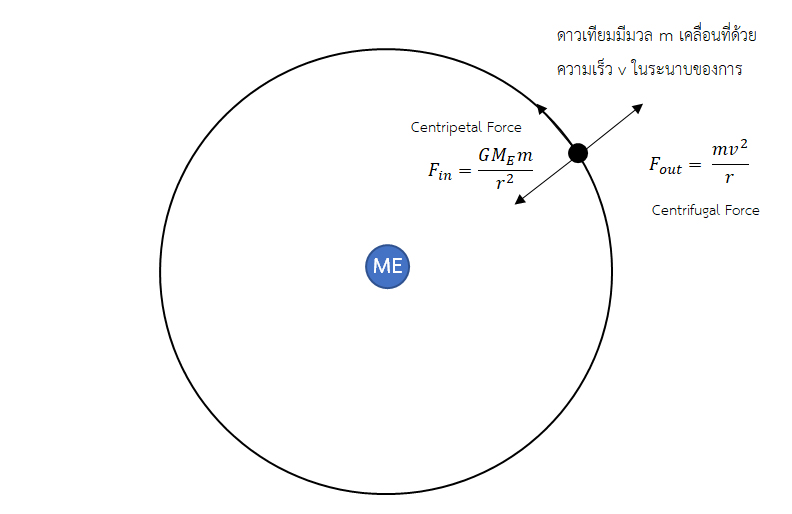
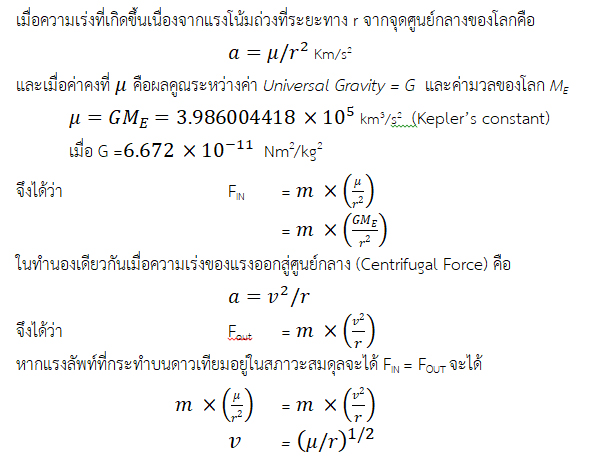
แรงที่กระทำต่อดาวเทียมในวงโคจรคงที่รอบโลกตามรูปที่ที่แสดงนั้น จะมีแรงที่กระทำต่อดาวเทียมคือ แรงที่เกิดจากอิทธิพลของแรงโน้มถ่วง ซึ่งจะแปรผกผันตามระยะห่างระหว่างจุกศูนย์กลางโลกและดาวเทียมกำลังสอง โดยทิศทางของแรง Fin จะเข้าสู่ศูนย์กลางของโลก และในส่วน Fout ของแรงที่มีทิศทางตรงข้ามกับแรง Fin เป็นแรงที่แปรผันตรงกับความเร็วของดาวเทียมยกกำลังสอง ซึ่งหากทั้งแรงทั้งสองมีขนาดเท่ากัน จะทำให้ดาวเทียมอยู่ในสภาวะ “free fall”
ตารางแสดงค่าความเร็ว คาบ ของระบบดาวเทียมแบบ GEO, MEO, LEO ที่โคจรรอบโลก
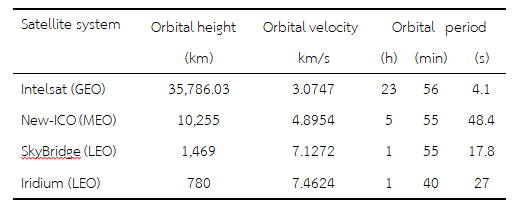
ค่าเฉลี่ยรัศมีโลก = 6378.137 กม. และรัศมีของวงโคจร GEO จากจุดศูนย์กลางโลก = 42,164.17 km
ระบบพิกัดคาร์ทีเซียนแสดงถึงความสัมพันธ์ระหว่างโลกและดาวเทียม
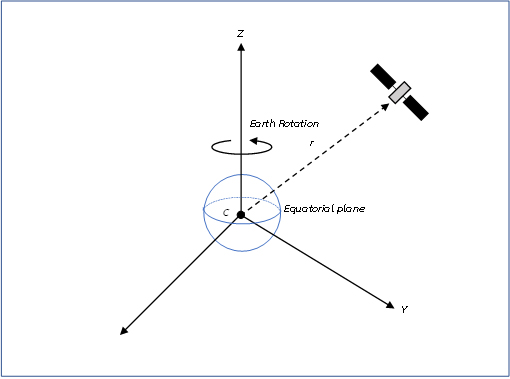
ทิศทางการหมุนของโลกตามแนวแกน CZ โดยจุด C คือจุดศูนย์กลางของโลก CZ มีทิศทางผ่านขั้วโลกเหนือ แกน CX, CY, CZ ต่างตั้งฉากซึ่งกันและกัน (Orthogonal axes) แกน CX, CY มีทิศทางเส้นศูนย์สูตรของโลก และเวกเตอร์คือเวิกเตอร์ทิศทางของดาวเทียมเทียบกับโลก
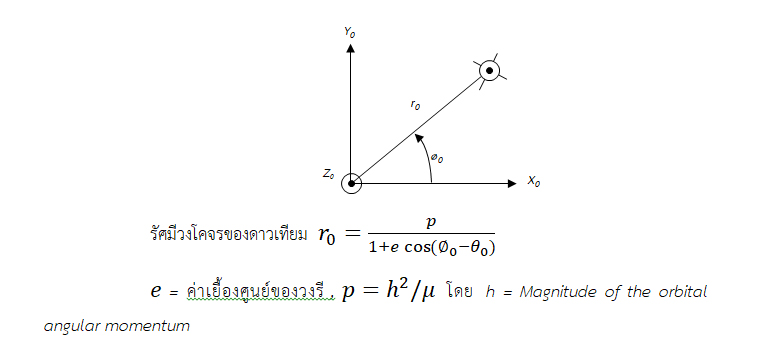
ระนาบการโคจรของดาวเทียม (Orbital Plane)
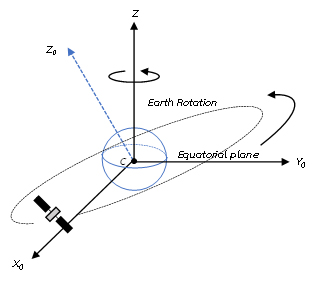
พิกัดเชิงมุมของระนาบการโคจรของดาวเทียม (Polar coordinate system)
กฎการเคลื่อนที่ของดาวเคราะห์ของเคปเลอร์
1. วงโคจรของวัตถุขนาดเล็กที่โคจรรอบวัตถุที่ใหญ่กว่าจะเป็นวงรีเสมอ ด้วยจุดศูนย์กลางของมวลวัตถุขนาดใหญ่กว่าคือหนึ่งในสองของจุดโฟกัส (Foci)
2. พื้นที่ของการกวาดวงโคจรจะมีขนาดเท่ากัน ณ เวลาของการโคจรเท่ากัน
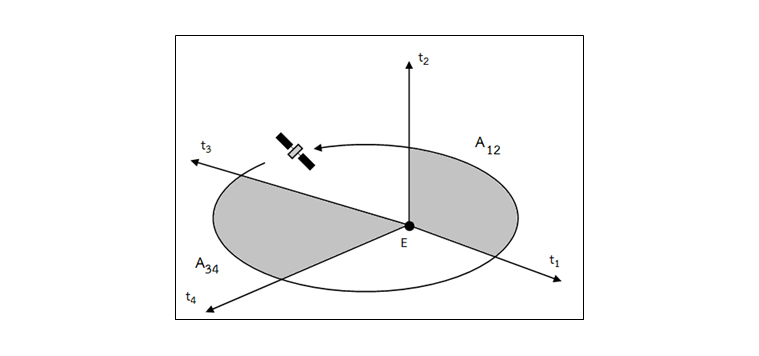
จากรูป ส่วนที่แรเงาเป็นพื้นที่การกวาดโดยดาวเทียม ส่วนแรกจะเป็นส่วนที่ดาวเทียมโคจรใกล้โลก (Perigee) และอีกส่วนของพื้นที่ที่เกิดจากการโคจรของดาวเทียม ณ จุดที่อยู่ห่างโลก (Apogee)
![]()
3. คาบของการเคลื่อนที่ยกกำลังสองจะแปรผันโดยตรงกับค่าของกำลังสามของความยาวแกนหลัก (Major Axes) ตามสมการ ![]()
การระบุตำแหน่งดาวเทียมเมื่อเทียบกับโลก
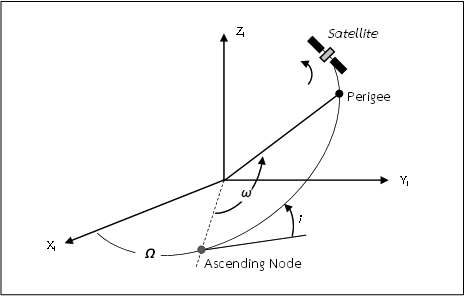
เมื่อดาวเทียมเคลื่อนที่ผ่านระบบของแนวศูนย์สูตรของโลก ค่า Ω คือค่าไรต์แอสเซนชันของ Ascending node, มุม i คือมุมระหว่างระนาบของเส้นศูนย์สูตรและระนาบของการโคจร และมุม ω คือมุมระหว่างจุด Perigee และระนาบเส้นศูนย์สูตร
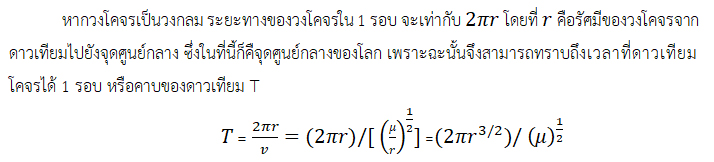
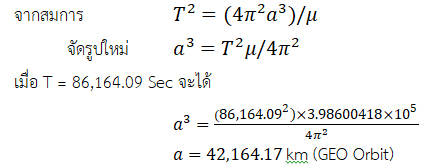
ตัวอย่างการคำนวณรัศมีการโคจรขอดาวเทียมจากสมการ
หากการโคจรของดาวเทียมรอบโลกใช้เวลา 1 รอบคือ 23 ชั่วโมง 56 นาที 4.09 วินาที จะแสดงว่าดาวเทียมนั้นมีรัศมีการโคจรคือ 42,164.17 กิโลเมตร
การกำหนดมุมมอง (Look Angle Determination)
ระบบพิกัดที่ใช้สำหรับการตั้งสายอากาศจากสถานีภาคพื้นเพื่อทำการติดต่อสื่อสารกับดาวเทียมนั้นเรียกว่า “มุมมอง (Look Angles)” ซึ่งส่วนใหญ่จะแสดงเป็นมุมกวาด (Azimuth : Az) หรือมุมเงย (Elevation : El)
จุดย่อยดาวเทียม หรือ The Subsatellite point คือจุดที่อยู่บนพื้นผิวโลกที่อยู่ในแนวเดียวระหว่างจุกศูนย์กลางของโลกไปยังดาวเทียม ซึ่งเรียกว่า Nadir
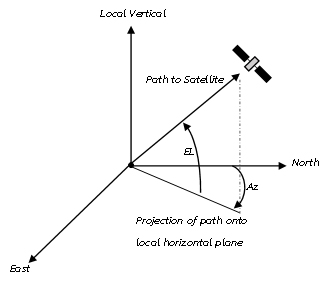
จากรูปแสดงการกำหนดมุม El และ Az โดย El คือมุมที่วัดจากระนาบเส้นขอบฟ้าไปยังดาวเทียม ส่วน Az คือมุมที่วัดระหว่างทิศเหนือ (True North) มาทางทิศตะวันออกกับเส้นเงาของทิศทางดาวเทียมบนระนาบเส้นขอบฟ้า

รูปแสดง Subsatellite และ Nadir
![]()