ทีมวิศวกรการบินและอวกาศยานกับทีมวิศวกรเหมืองแร่ของ University of Arizona ได้รับทุนสนับสนุนจากองค์การบริหารการบินและอวกาศแห่งชาติ (NASA) สหรัฐอเมริกา จำนวน ๕๐๐,๐๐๐ เหรียญสหรัฐฯ ซึ่งเป็นโครงการใหม่ในการพัฒนาเทคนิคการทำเหมืองแร่และพัฒนาหุ่นยนต์ Autonomous Robot Swarmsเพื่อส่งไปปฏิบัติการบนดวงจันทร์
การทำเหมืองแร่บนโลกวิธีการเดิมนั้น คนงานเหมืองจะต้องทำการเจาะชั้นหินซึ่งใช้เวลามาก
ทีมวิศวกรเหมืองแร่จึงแก้ปัญหาดังกล่าวด้วยการใช้เทคนิคใหม่ โดยเป็นกระบวนการทางไฟฟ้าเคมีที่สามารถเจาะชั้นหินได้เร็วกว่าวิธีการอื่นถึง ๕ เท่า ทีมวิศวกรการบินและอวกาศยานจึงพัฒนาหุ่นยนต์ด้วยการนำซอฟต์แวร์ Machine Learning แบบ Neuromorphic มีชื่อเรียกว่า Human and Explainable Autonomous Robotic System (HEART) ปรับปรุงระบบให้หุ่นยนต์มีความเสถียร ความน่าเชื่อถือและมีประสิทธิภาพ ทีมงานวางแผนการสร้างหุ่นยนต์แล้วทดสอบในสภาพแวดล้อมปลอดภัยบนโลกก่อนจากนั้นจะส่งหุ่นยนต์ขึ้นไปทดสอบบนอวกาศ และนำไปปฏิบัติงานจริงบนดวงจันทร์ ในอนาคตจะมีการทำเหมืองขุดแร่ธาตุและสร้างโรงงานผลิตชิ้นส่วนอุปกรณ์สำคัญบนดวงจันทร์ เช่น การนำไทเทเนียมที่ใช้สำหรับผลิตชิ้นส่วนอวกาศยาน การผลิตอุปกรณ์อิเล็กทรอนิกส์สำหรับสร้างเครื่องมือแพทย์ เครื่องมือสื่อสาร การผลิตโลหะที่มีมูลค่าสูงและหายากเช่น ทองคำ แพลตตินัม การผลิตฮีเลียม – ๓ ซึ่งเป็นไอโซโทปฮีเลียมแบบเสถียรสำหรับใช้เป็นเชื้อเพลิงให้กับโรงไฟฟ้าพลังงานนิวเคลียร์ซึ่งเป็นสิ่งที่จำเป็นและสำคัญในอนาคต
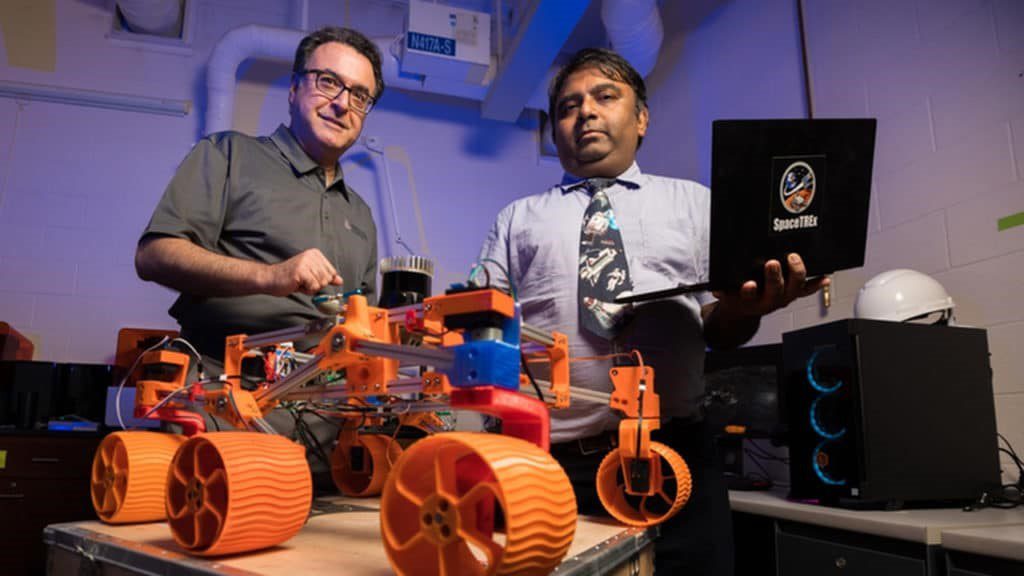
ภาพ Jekan Thanga อาจารย์ประจำภาควิชาวิศวกรรมศาสตร์ของ University of Arizona และ Moe Momayez กับรถต้นแบบ Rover ที่สร้างจากเครื่องพิมพ์สามมิติ เพื่อใช้ทดสอบเซ็นเซอร์ขนาดเล็กรุ่นใหม่
วัตถุประสงค์ของโครงการนี้จะเป็นการสร้างหุ่นยนต์ให้มีความสามารถในการปฏิบัติภารกิจ การค้นหาแร่ธาตุการทำเหมือง ซึ่งเป็นการทำงานในสภาพแวดล้อมที่ไม่ปลอดภัยบนอวกาศและดวงจันทร์ทดแทนมนุษย์โดยโครงการนี้นับเป็นส่วนหนึ่งของภารกิจ Artemis 1 เพื่อนำข้อมูลที่ได้รับไปใช้สำหรับการปรับปรุงแก้ไขขีดจำกัดของการปฏิบัติภารกิจบนอวกาศ ก่อนจะส่งมนุษย์ไปดาวอังคารให้สำเร็จในอนาคต
ที่มา : https://www.inceptivemind.com/engineers-develop-autonomous-robot-swarms-mine-lunar-
resources/21108/
ผู้แปล : ร.อ.ยุทธนา สุพรรณกลาง