ระบบ Astrobee เป็นผลงานการวิจัยพัฒนาโดยทีม Teleworks ณ ศูนย์วิจัย Ames ของ NASA ใน Silicon Valley มลรัฐแคลิฟอเนียร์สร้างหุ่นยนต์บินได้อิสระเพื่อทำงานร่วมทีมกับนักบินอวกาศบนสถานีอวกาศนานาชาติ ได้รับทุนจากโครงการ Game Changing Development ใน NASA’s Space Technology Mission Directorateและ the Advanced Exploration Systems program ซึ่งเป็นส่วนหนึ่งของ Human Exploration and Operations Mission Directorate หุ่นต์ยนต์ Astrobee สร้างขึ้นจากมรดกและบทเรียนที่เรียนรู้จากหุ่นยนต์ SPHERES อยู่บนสถานีมานานกว่าทศวรรษ
ระบบ Astrobee ประกอบด้วยหุ่นยนต์ทรงลูกบาศก์ ขนาดกว้าง ๑๒.๕ นิ้ว บินได้อิสระบนสภาพไร้น้ำหนักในสถานีอวกาศ จำนวน ๓ ตัวชื่อ Bumble, Honey และ Queen แต่ละตัวจะประกอบไปด้วยซอฟต์แวร์ แท่นวางใช้ในการชาร์จ พัดลมไฟฟ้าเป็นระบบขับเคลื่อนบินได้อย่างอิสระผ่านสภาพแวดล้อมไร้น้ำหนักของสถานีกล้องและเซ็นเซอร์ช่วยให้หุ่นยนต์มองเห็นและนำทางไปรอบ ๆ ตัวได้ หุ่นยนต์ยังมีแขนเกาะช่วยให้พวกเขาจับราวของสถานีเพื่อประหยัดพลังงานหรือยึดจับสิ่งของต่างๆ หุ่นยนต์ทั้งสามถูกสร้างจากภาคพื้นและมีการขนส่งขึ้นไปสถานีอวกาศนานาชาติตามลำดับ ดังนี้
๑. แท่นติดตั้งของ Astrobee ถูกปล่อยไปยังสถานีอวกาศเมื่อวันที่ ๑๗ พฤศจิกายน พ.ศ.๒๕๖๑บนภารกิจการบริการเสริมเชิงพาณิชย์ครั้งที่ ๑๐ ของ Northrop Grumman (Northrop Grumman CRS-10)จาก Wallops Flight Facility ของ NASA ในมลรัฐเวอร์จิเนีย และได้รับการติดตั้งกับ Japanese Experiment Module บนสถานีอวกาศนานาชาติ เมื่อวันที่ ๑๕ กุมภาพันธ์ พ.ศ.๒๕๖๒
๒. หุ่นยนต์ Astrobee ตัวแรกกับตัวที่สองชื่อ Bumble and Honey ถูกปล่อยไปขึ้นสู่สถานีอวกาศเมื่อวันที่ ๑๗ เมษายน พ.ศ.๒๕๖๒ บนภารกิจบริการเสริมเชิงพาณิชย์ครั้งที่ ๑๑ ของ Northrop Grumman(Northrop Grumman CRS-11) จาก Wallops Flight Facility ของ NASA มลรัฐเวอร์จิเนีย
๓. หุ่นยนต์บินได้อิสระตัวที่สามของ Astrobee ชื่อ Queen และแขนเกาะสามแขนถูกปล่อยขึ้นสู่สถานีอวกาศเมื่อวันที่ ๒๕ กรกฎาคม พ.ศ.๒๕๖๒ บนภารกิจบริการเสริมเชิงพาณิชย์ครั้งที่ ๑๘ ของ SpaceX (SpaceX CRS-18) จากฐานปล่อยจรวดกองทัพอากาศ แหลม Canaveral มลรัฐฟลอริดา


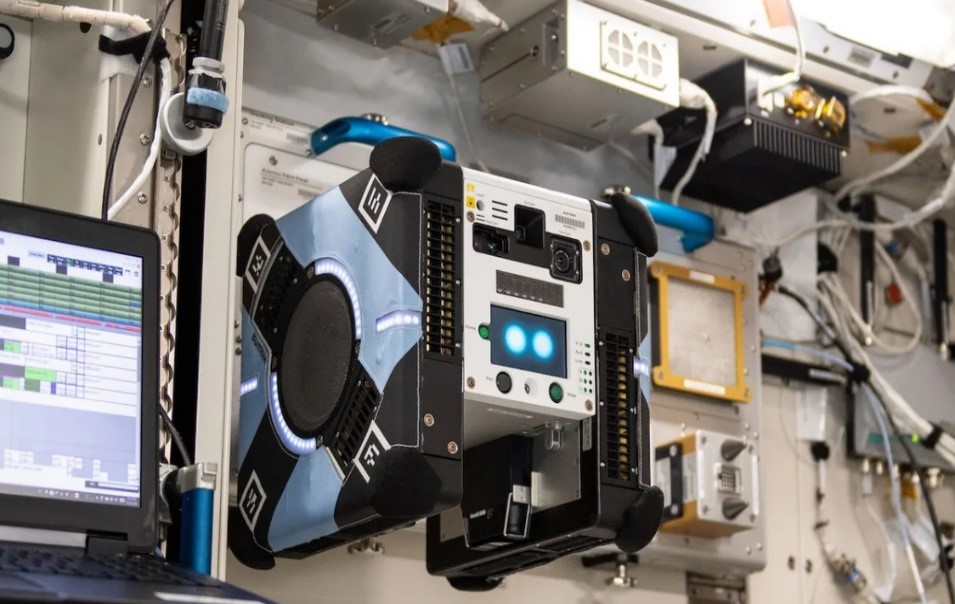
หุ่นยนต์ Bumble เริ่มต้นภารกิจแรกจากการปลดล็อคตัวเองทำตามแผนการบินเคลื่อนที่ไปจุดอ้างอิงที่อัปโหลดไว้ แล้วบินกลับไปยังแท่นชาร์ตของตนเอง ณ JEM : Japanese Experiment Module บนสถานีอวกาศ ซึ่งเป็นการบินอัตโนมัติแบบอิสระบินเที่ยวไปรอบๆ สถานีอวกาศนานาชาติ เพื่อสร้างความคุ้นเคยบ้านหลังใหม่ ดำเนินการทำแผนที่สภาพแวดล้อมและได้รับการช่วยเหลือจากนักบินอวกาศเพียงแค่การติดตามและคอยห่างจากกล้องนำทางของหุ่นยนต์เท่านั้นและไม่มีการแทรกแซงโดยตรงจากผู้ควบคุมภาคพื้น
ISAAC คือ ซอฟท์แวร์ที่อยู่เบื้องหลังการทำงานหุ่นยนต์ Astrobee เป็นมากกว่าซอฟท์แวร์เพื่อจัดการงานกับหุ่นยนต์เท่านั้น เนื่องจากเป็นระบบสามารถเรียนรู้วิธีการจัดการกับสถานการณ์ต่างๆ การปรับตัวกับสภาพแวดล้อมบนอวกาศสภาพไร้น้ำหนักขีดจำกัดด้านต่างๆ และสามารถเปลี่ยนอวกาศยานเป็นหุ่นยนต์อัตโนมัติได้ในอนาคตอันใกล้นี้ การวิจัยพัฒนาเทคโนโลยีด้านนี้จะเป็นไปอย่างต่อเนื่อง
การทดสอบแรกเป็นการพัฒนาระบบควบคุมหุ่นยนต์ผู้ช่วยนักบินอวกาศ เมื่อพัฒนาได้สำเร็จจนถึงจุดที่ระบบมีความฉลาดขั้นพื้นฐานเทียบเท่ามนุษย์ ระบบดังกล่าวจะสามารถเข้าควบคุมปฏิบัติการในอาณานิคมนอกอวกาศได้อย่างสมบูรณ์ แม้ไม่มีมนุษย์
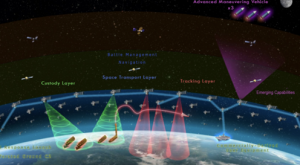
การทดสอบชุดต่อไปสำหรับ ISAAC จะเน้นที่ความสามารถของยานยนต์อิสระในการขนส่งสินค้าข้ามฟากระหว่างสถานีอวกาศและยานอวกาศขนส่งสินค้า หลังจากนั้น Astrobees และ ISAAC จะได้รับการทดสอบความสามารถในการตอบสนองต่อไฟจำลองและการรั่วไหลของห้องโดยสาร
สุดท้ายนี้เราจะเห็นว่าหุ่นยนต์ Astrobee มีบทบาทสำคัญในภารกิจของหน่วยงานการกลับคืนสู่ดวงจันทร์ระบบซอฟท์แวร์ ISAAC จะเป็นผู้ดูแลอวกาศยาน ติดตาม ทำให้อวกาศยานทำงานได้อย่างราบรื่นถึงแม้จะไม่มีลูกเรือที่เป็นมนุษย์ ชึ่งเป็นกุญแจสำคัญในการควบคุมสถานีอวกาศ GATEWAY อาณานิคมบนดวงจันทร์และดาวอังคารของโครงการ ATIMIS ให้ประสบความสำเร็จในอีกไม่กี่ปีข้างหน้านี้
ที่มาภาพและข้อความ :
แปลและสรุปเนื้อหาบทความโดย ร.อ.ยุทธนา สุพรรณกลาง